Intelligente Mobilität mit MOSAIC
Anwendungsbereich
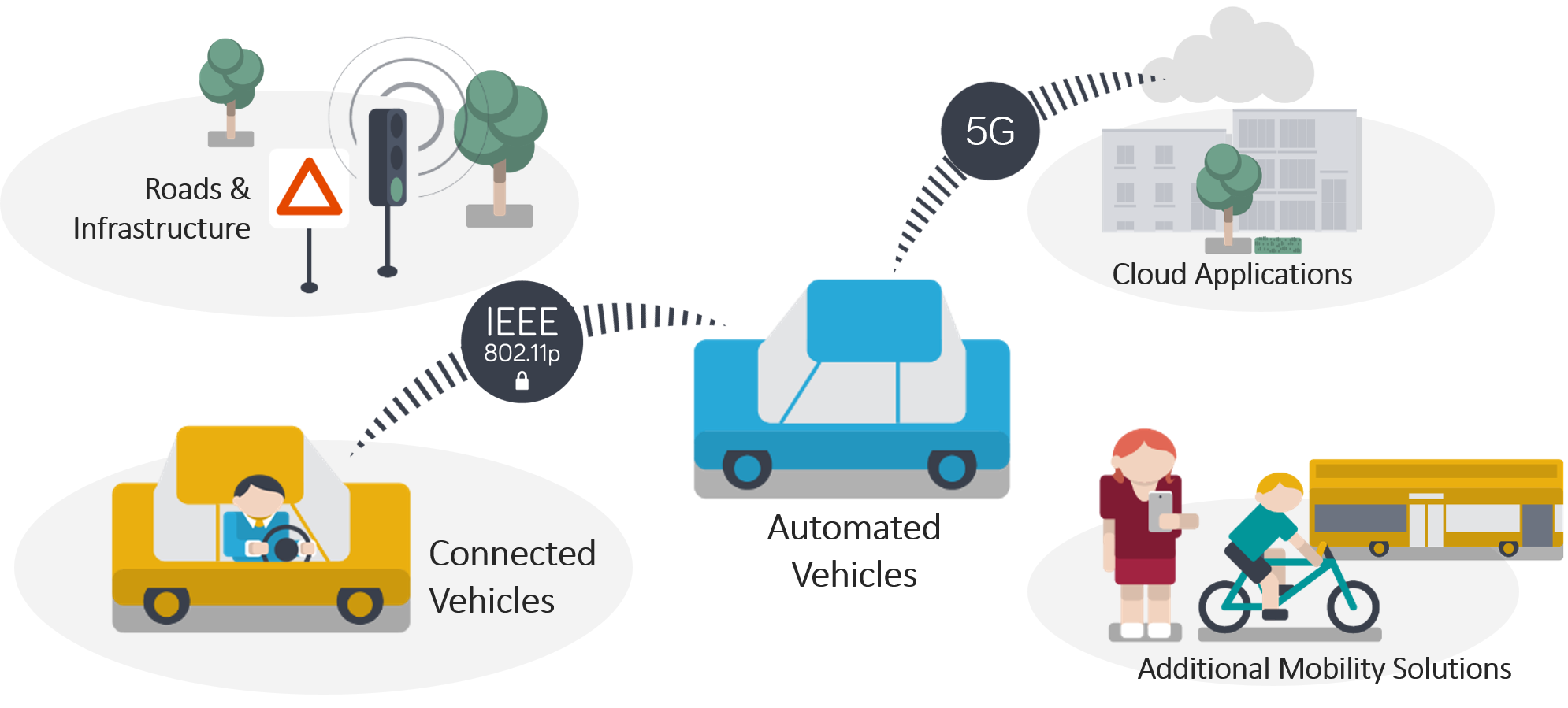
Intelligente Mobilitätsanwendungen und kooperative Verkehrssysteme tragen dazu bei, die Sicherheit und Effizienz des Verkehrs zu erhöhen. Die Simulation entsprechender Szenarien ist jedoch eine Herausforderung, da hier verschiedene Simulationswelten aufeinandertreffen, z.B. Fahrzeugverkehr, drahtlose Netzwerkkommunikation und Anwendungsmodellierung. Um dieses Problem zu lösen, koppelt MOSAIC verschiedene Simulatoren und ermöglicht somit eine ganzheitliche Simulation der verschiedenen Aspekte zukünftiger Intelligenter Verkehrssysteme. Folglich ermöglichen MOSAIC-Simulationen die Analyse neuartiger Mobilitätslösungen, bevor reale Feldtests beginnen.
Co-Simulation
Im Gegensatz zu bestehenden festen Simulatorkopplungen ermöglicht die MOSAIC-Simulationsinfrastruktur die einfache Integration und den Austausch von existierenden Simulatoren. So ermöglicht die hohe Flexibilität von MOSAIC die Kopplung der am besten geeigneten Simulatoren für eine realistische Darstellung von Fahrzeugverkehr, Emissionen, drahtloser Kommunikation (zellulär und ad-hoc), Nutzerverhalten und Mobilitätsanwendungen. Alle Aufgaben der Simulatorverwaltung, wie Zeit- und Datensynchronisation, Interaktion und Simulatormanagement, werden vollständig von der MOSAIC-Laufzeitumgebung (Runtime Infrastructure/RTI) übernommen.
Multiple Domänen
Simulatoren decken in der Regel bestimmte Bereiche ab, z. B. den Verkehr oder die Kommunikation. Mit MOSAIC können die am besten geeigneten Simulator für jede Domäne kombiniert werden, um eine ganzheitliche Systemsimulation zu erhalten. Die folgenden Simulatoren sind bereits mit MOSAIC gekoppelt: Eclipse SUMO, PHABMACS (Verkehr), OMNeT++, ns-3, MOSAIC SNS, MOSAIC Cell (Kommunikation), MOSAIC Application (Anwendung und Verhalten), und weitere.
Multiple Skalen
Je nach den spezifischen Anforderungen eines Simulationsszenarios können die am besten geeigneten Simulatoren verwendet werden. Selbst innerhalb eines bestimmten Bereichs modellieren verschiedene Simulatoren unterschiedliche Detaillgrade. Beispielsweise können Verkehrssimulationen tausende von Fahrzeugen gleichzeitig verarbeiten, allerdings nur auf einer wenig detaillierten Modellierungsebene, die für bestimmte Anwendungsfälle möglicherweise nicht ausreicht. Für diesen Zweck könnte ein Fahrzeugsimulator verwendet werden, der die Fahrzeugdynamik auf einer hochdetaillierten Ebene modelliert, wie z.B. PHABMACS. Mit MOSAIC ist der Austausch dieser Simulatoren auf verschiedenen Modellierungsebenen unkompliziert möglich, so dass Simulationen von Fahrerassistenzsystemen (ADAS) einzelner Fahrzeuge bis hin zur Analyse der Verkehrseffizienz von Mobilitätsanwendungen auf stadtweiter Ebene möglich sind.
Modellierung und Konfiguration
Der MOSAIC-Anwendungssimulator ist eine einfache Möglichkeit, Mobilitätsanwendungen mit MOSAIC zu testen und zu bewerten. Anwendungen für verschiedene Einheiten, wie Fahrzeuge, Server und Road-Side Units, können dank einer gut etablierten Java-API leicht integriert werden. Benutzerdefinierte Anwendungen können mit Hilfe einer ausgeklügelten Mapping-Konfiguration auf alle Entitäten abgebildet werden, was eine einfache Anpassung der Durchdringungsrate und des Verkehrsaufkommens ermöglicht. Nach dem Seperation-of-Concerns-Prinzip wird jeder Simulator separat konfiguriert, was eine flexible Parametrisierung der Simulationsszenarien ermöglicht.
Auswertungswerkzeuge
MOSAIC wird mit einer breiten Palette von Werkzeugen ausgeliefert, die bei der Bewertung der zu testenden Lösungen und Anwendungen helfen. Der MOSAIC Output Generator ermöglicht die Aufzeichnung aller notwendigen und erforderlichen Informationen zu jedem Zeitpunkt der Simulation. Diese Daten können in Kombination mit Post-Processing-Tools verwendet werden, um individuelle Statistiken zu erstellen. Darüber hinaus helfen verschiedene Visualisierungswerkzeuge dabei, die Vorgänge in der Simulation zu verstehen.
(Kartendaten © OpenStreetMap Contributors)
Interesse an MOSAIC?
Das MOSAIC Simulation-Framework gibt es in zwei verschiedenen Ausführungen: die freie Open-Source Variante und die erweiterte kommerzielle Variante.
Eclipse MOSAIC ist Open-Source unter dem Dach der Eclipse Foundation und auf dem Eclipse Github im Quellcode verfügbar. Für den schnellen Start gibt es auf unserer Download-Seite breits vorkompilierte Pakete, die Basis-Simulatoren und Werkzeuge enthalten, die für die Bewertung von Anwendungen der vernetzter, intelligenten Mobilität mit Fahrzeug-zu-X-Kommunikation benötigt werden.
MOSAIC Extended ist die kommerzielle Version von MOSAIC und enthält zusätzliche Werkzeuge und Simulatoren. Dieses Bundle wird so angepasst, dass es perfekt auf die Bedürfnisse Ihres persönlichen Anwendungsfalls zugeschnitten ist.
Der Preis der MOSAIC Extended version hängt davon ab, welche zusätzlichen Inhalte Sie benötigen. Dazu gehören u.a. Simulatoren für Elektromobilität, der MOSAIC-Statistikgenerator, eine 3D-Visualisierung oder der PHABMACS-Fahrzeugsimulator.
Für mehr Informationen und Preisanfragen erreichen Sie uns gern und jederzeit unter
