Smarter Mobility with Simulation
Scope
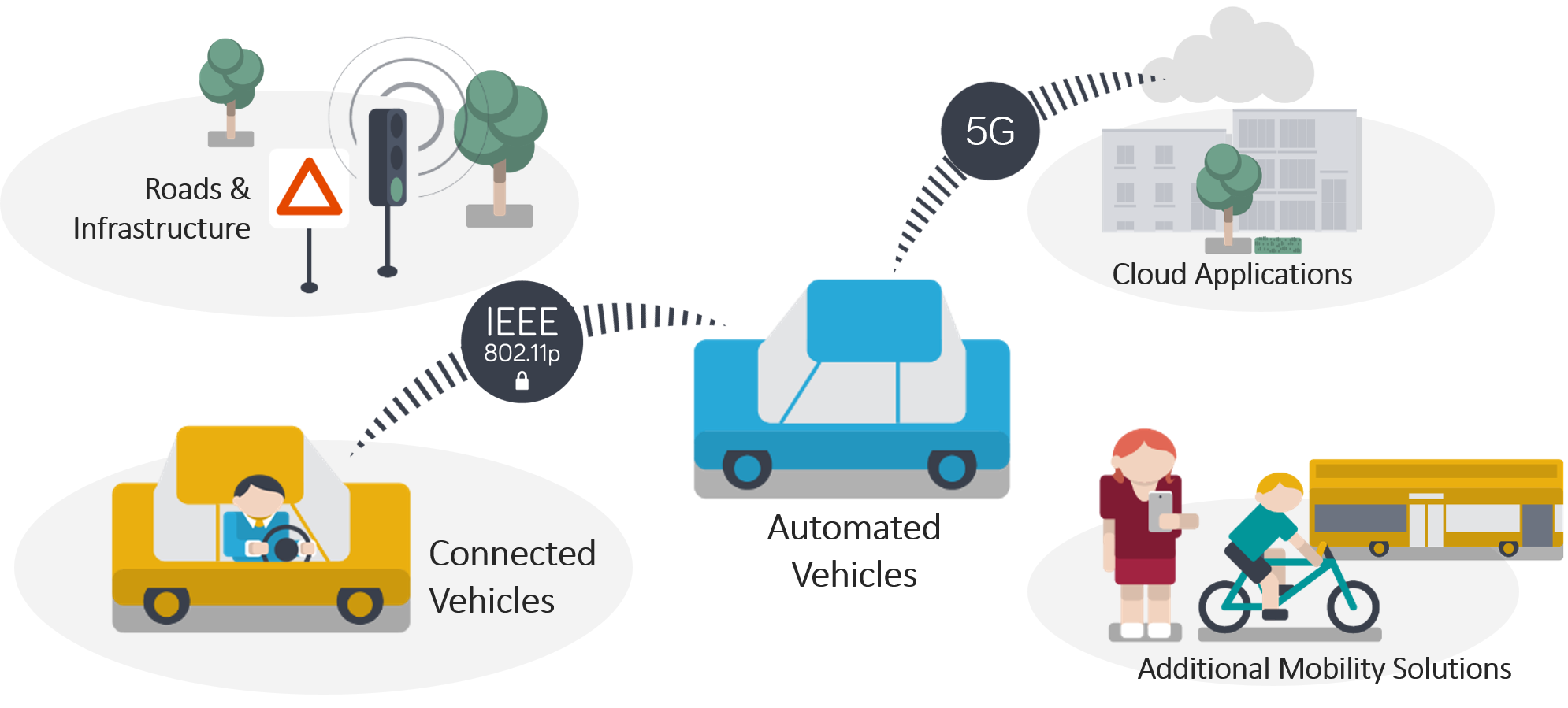
Smart Mobility applications and Cooperative Transportation Systems help to enhance safety and traffic efficiency. However, the simulation of corresponding scenarios is a challenge because different simulation worlds come together here: e.g. vehicular traffic, wireless network communication, and application modeling. To solve this problem, MOSAIC couples different simulators and enables the simulation of the various aspects of future Intelligent Transportation Systems. Consequently, MOSAIC simulations allow the analysis of novel mobility solutions before real field tests start.
Co-Simulation
In contrast to existing fixed simulator couplings, the MOSAIC simulation infrastructure allows the easy integration and exchange of simulators. Thus, the high flexibility of MOSAIC enables the coupling of the most appropriate simulators for a realistic presentation of vehicular traffic, emissions, wireless communication (cellular and ad-hoc), user behavior, and mobility applications. All simulator management tasks, such as time and data synchronization, interaction and lifecycle management, are handled completely by the MOSAIC runtime infrastructure (RTI).
Multi-Domain
Simulators usually cover specific domains, such as traffic or communication. With MOSAIC one can combine the most suitable simulator of each domain to build a holististic system simulation. The following simulators are already coupled with MOSAIC: Eclipse SUMO, our PHABMACS simulator (Traffic), OMNeT++, ns-3, MOSAIC Simple Network Simulator (SNS), MOSAIC Cell (Communication), MOSAIC Application (Application and behavior), and more.
Multi-Scale
Depending on the specific requirements of a simulation scenario, the most relevant simulators can be used. Even within a specific domain different simulators model different levels of domain. For example, traffic simulations can handle thousands of vehicles at once, but only on a low-detailed modelling level which might not be sufficient for specific use cases. For this purpose, a vehicle simulator modelling vehicle dynamics on a high-detailed level might be used, such as PHABMACS. With MOSAIC the exchange of these simulators on different modelling levels is uncomplicated, allowing simulations of advanced driver assistence systems (ADAS) of single cars, up to analyzing the traffic efficiency of Smart Mobility applications on a city-wide level.
Modelling and Configuration
The MOSAIC Application simulator is a simple way to test and evaluate Smart Mobility applications with MOSAIC. Applications for different entities, such as vehicles, servers, and road side units, can be integrated easily thanks to a well-established Java-API. Custom applications can be mapped onto all entities using a sophisticated mapping configuration, allowing easy adjustments of penetratration rates and traffic volumes. Following the Seperation-of-Concerns principle, each simulator is configured separately allowing a flexible parametrization of simulation scenarios.
Evaluation Tools
MOSAIC is bundled with a broad range of tools to help evaluating the solutions and applications under test. The MOSAIC Output Generator allows to log all necessary and required information on any time from the simulation. This data can be used in combination with post-processing tools to gather custom statistics. Furthermore, various visualization tools help to understand what is happening in the simulation.
(Map data © OpenStreetMap Contributors)
Access to MOSAIC
The MOSAIC simulation framework comes in two flavors: the Open Source version and an extended commercial version.
Eclipse MOSAIC is Open Source under the umbrella of the Eclipse Foundation and the complete source code can be downloaded from Eclipse Github. For a quick start we provide a pre-configured bundle. This bundle includes the basic simulators and tools required for the assessment of novel connected mobility applications with vehicle-2-x communication.
MOSAIC Extended is the commercial version of MOSAIC and comes with additional tools and simulators. This bundle can be customized so that it fits perfectly to your needs and use-case.
A quote of the MOSAIC Extended bundle depends on the additional compontents you need, which are, amongst others, simulators for electric mobility, the MOSAIC Statistics Generator, a 3D visualization, and the PHABMACS vehicle simulator.
Please inquire further details and prices directly with us at
