Simulation Research
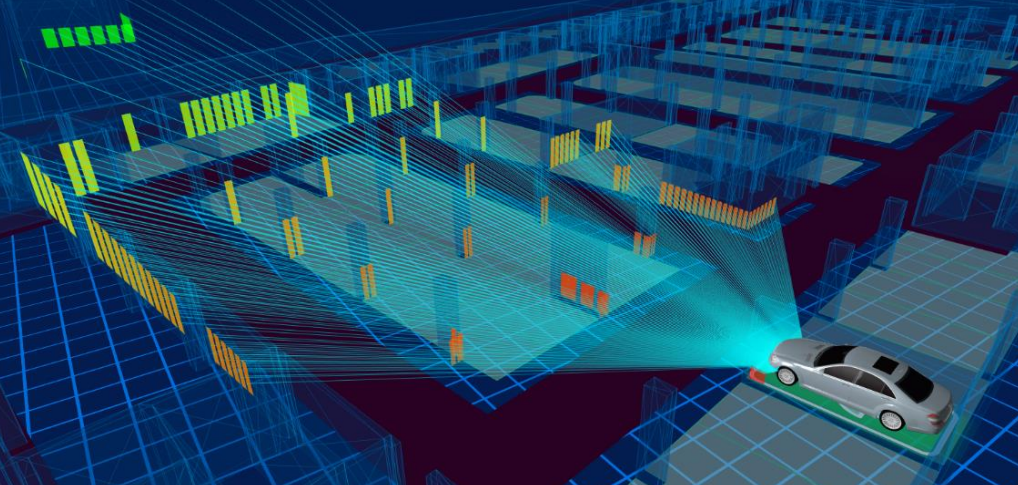
The assessment of new solutions for connected and automated mobility requires sophisticated tools. In this context, we at the DCAITI develop solutions for the holistic simulation of mobility applications. The MOSAIC simulation framework offers a flexible tool to setup sytem simulations for smart and connected mobility, while PHABMACS offers a platform for rapidly prototyping novel driver assistence systems.
Smart Mobility Simulation
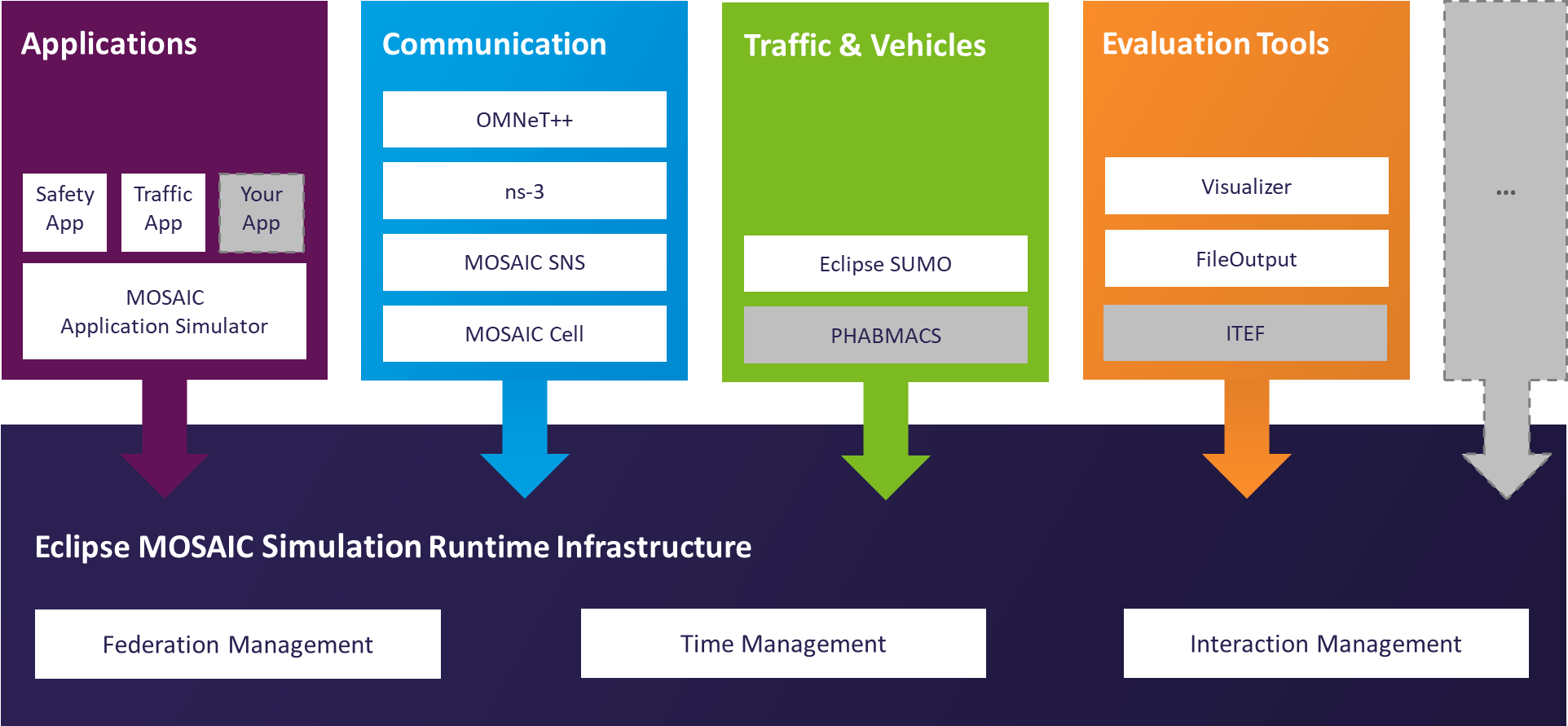
Eclipse MOSAIC and MOSAIC Extended are part of a multi-scale and multi-domain simulation frameworks for the assessment of new solutions for connected and automated mobility. Vehicle movements and sophisticated communication technologies like Vehicle-2-X communication and cellular networks can be modeled in detail. With MOSAIC you get one of the most flexible systems available in the automotive research arena to dynamically simulate Smart Mobility applications and to assess their impacts and benefits.
Prototyping Cooperative ADAS
 .
.