Simulative Forschung
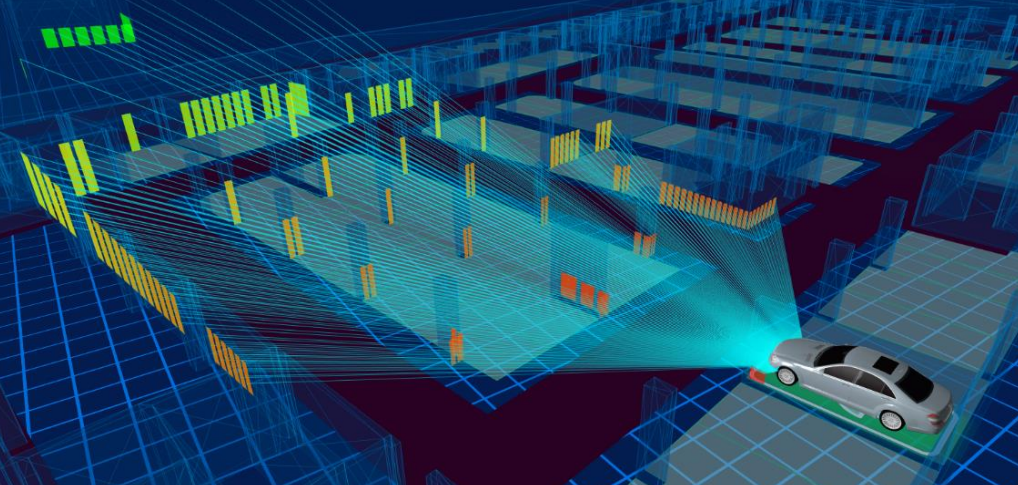
Die Bewertung neuer Lösungen für vernetzte und automatisierte Mobilität erfordert anspruchsvolle Werkzeuge. In diesem Zusammenhang entwickeln wir am DCAITI Lösungen für die ganzheitliche Simulation von Mobilitätsanwendungen. Das Simulationsframework MOSAIC bietet ein flexibles Werkzeug zur Erstellung von Systemsimulationen für intelligente und vernetzte Mobilität. Mit PHABMACS bieten wir eine Plattform für das schnelle Prototyping neuartiger Fahrerassistenzsysteme.
Simulation Intelligenter Mobilität
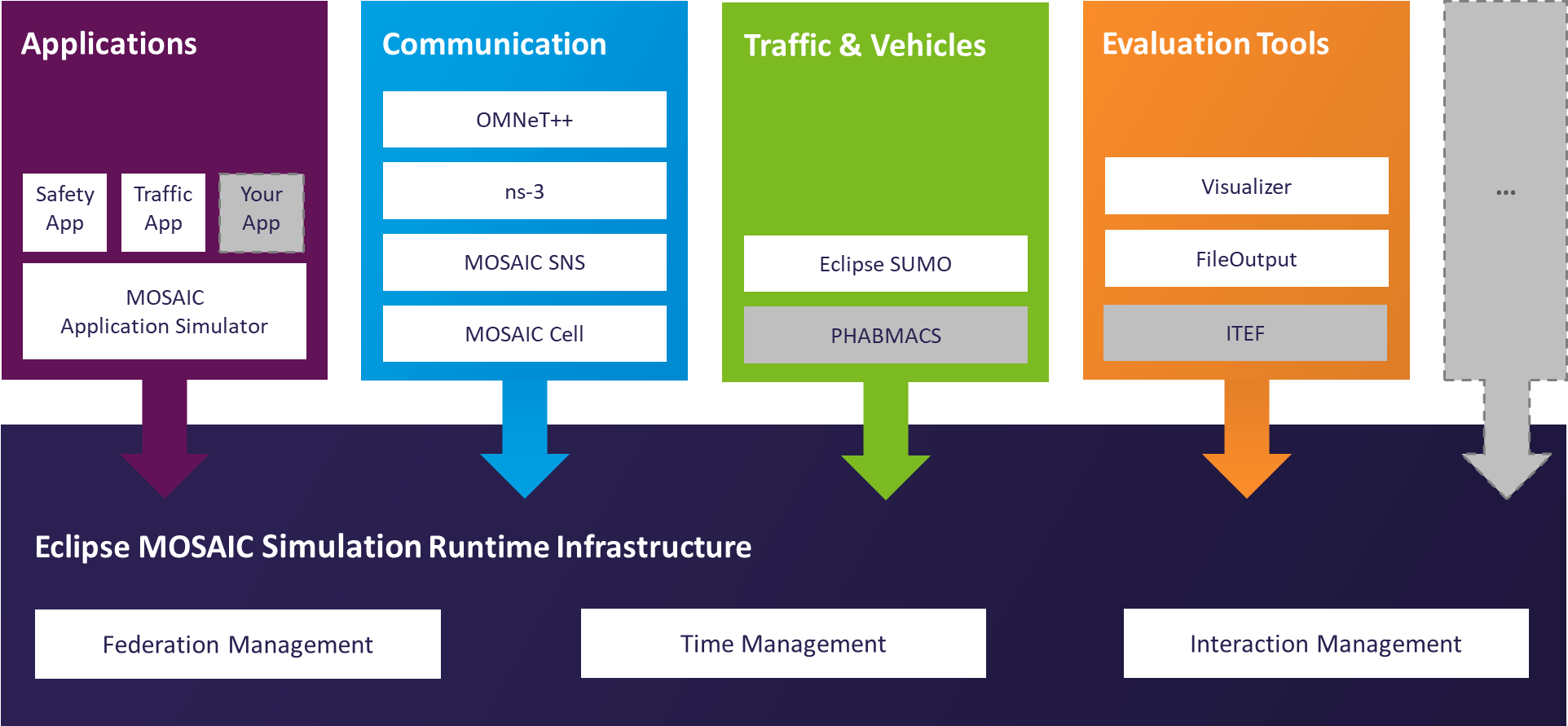
Eclipse MOSAIC und MOSAIC Extended bilden ein umfangreiches Simulations-Framework für die Bewertung neuer Lösungen für vernetzte und automatisierte Mobilität. Fahrzeugbewegungen und anspruchsvolle Kommunikationstechnologien wie Fahrzeug-2-X-Kommunikation und zellulare Netzwerke können detailliert modelliert werden. Mit MOSAIC bieten wir eines der flexibelsten Systeme, die im Bereich der Automobilforschung verfügbar sind, um Anwendungen der intelligenten Mobilität dynamisch zu simulieren und ihre Auswirkungen und Vorteile zu bewerten.
Entwicklung Kooperativer ADAS
 .
.